Information about the Bretl Research Group.
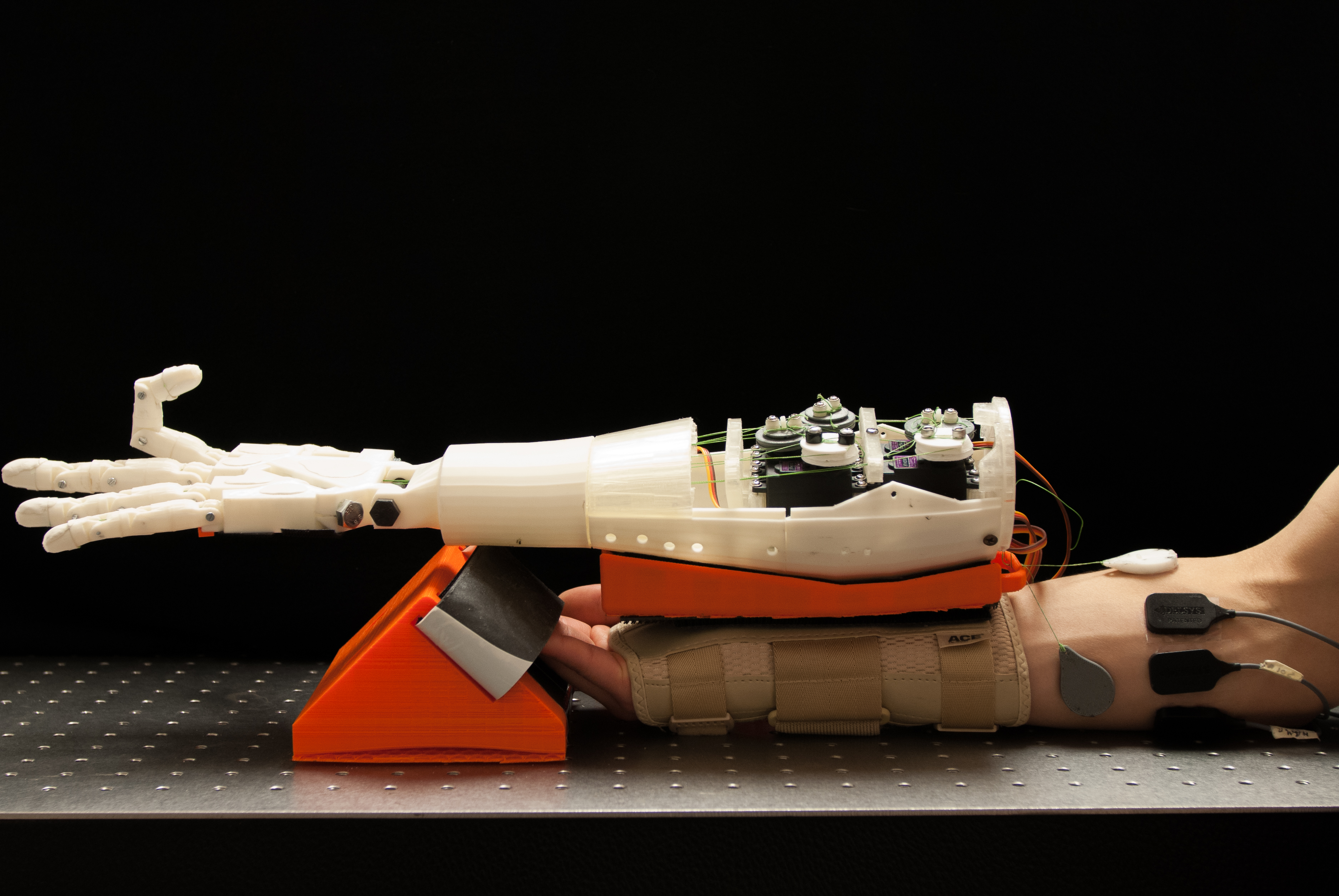 The Bretl Research Group’s goals include making prosthetic devices affordable to all who need them, increasing the efficiency and safety of building construction, and lowering barriers to the use of robots for manufacturing automation by small businesses (particularly those owned and controlled by their workers). In pursuit of these goals, we conduct basic research in areas that include electrodiagnostic analysis of brain and muscle activity and control-theoretic analysis of dexterous manipulation and legged locomotion.
The Bretl Research Group’s goals include making prosthetic devices affordable to all who need them, increasing the efficiency and safety of building construction, and lowering barriers to the use of robots for manufacturing automation by small businesses (particularly those owned and controlled by their workers). In pursuit of these goals, we conduct basic research in areas that include electrodiagnostic analysis of brain and muscle activity and control-theoretic analysis of dexterous manipulation and legged locomotion.
Our Principal Investigator is Timothy Wolfe Bretl.
If you would like to learn more of our different research focuses, please expand the buttons below or click here to learn more about us.